veröffentlicht am 7.12.2021

Ich habe ein ferngesteuertes Modellauto gebaut, das dieselben Schwankbewegungen wie ein echtes Auto durchführt, jedoch im Maßstab 1:10. Aber wie bin ich zu diesem Punkt gekommen? Das Einzige, was ich vom ursprünglichen Modell übernommen habe, sind die grundlegenden Chassiskomponenten wie Achsen und andere Teile. Zunächst habe ich die Aufnahmen für die Servomotoren, die die Bewegungen des Modells erzeugen, mit einem CAD-Programm entwickelt und dann in ein Slicing-Programm geladen, das das CAD-Modell in feine Scheiben schneidet und für den 3D-Drucker lesbar macht. Nachdem die Einzelteile gedruckt waren, habe ich sie nachbearbeitet und die Löcher mit der Standbohrmaschine nachgebohrt bzw. Gewinde geschnitten, um eine genauere Passform zu gewährleisten. Als alles gepasst hat, habe ich die Einzelteile probeweise zusammengebaut und die Mechanik mit einem einzelnen Servo getestet. Der Test war erfolgreich, sodass ich auch die restlichen Servos mit ihren Aufnahmen eingebaut und voreingestellt habe.
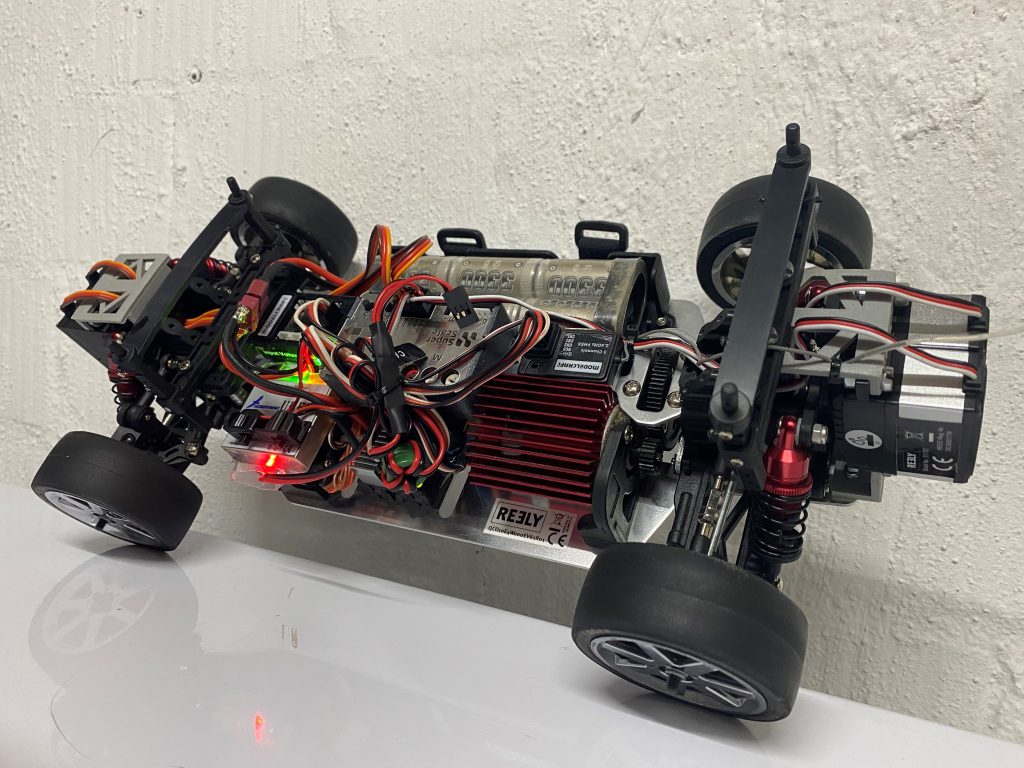
Um die Bewegungen der Servos zu steuern und die durch das 3-Achsen-Gyroskop gemessenen Bewegungen des Chassis zu verarbeiten, wird ein Mikroprozessor, also eine Art kleiner Computer, benötigt. Diese Aufgabe übernimmt hier ein Arduino Nano, der so programmiert werden kann, dass die gewünschten Neigungen exakt wiedergegeben werden. Die Servos sowie die Steuereinheit benötigen eine relativ hohe Stromstärke und eine konstante Spannung von 6 Volt. Daher muss die Spannungsversorgung aktiv durch einen sogenannten BEC (Battery Eliminator Circuit) geregelt werden, der eine konstante und störungsfreie Stromversorgung gewährleistet. Nachdem die Steuerung geregelt war, mussten alle Komponenten, wie der BEC, die Steuereinheit und eine zweite Steuerung für die LEDs, die später in die Karosserie eingesetzt werden sollen, sowie die zahlreichen Kabel, sorgfältig verlegt und eingebaut werden.


Nachdem die Technik geregelt war, widmete ich mich dem Aussehen des Modells. Zuerst schnitt ich die neue Lexan-Karosserie mit Cutter und Schere aus. Anschließend klebte ich alle Bereiche ab, die nicht lackiert werden sollten, wie Fenster, Scheinwerfer und Rückleuchten, um sie vor unerwünschtem Lack zu schützen. Mit der vorbereiteten Karosserie konnte das Lackieren beginnen. Ich verwendete eine spezielle Lexanfarbe von Tamiya in Champagner Gold (Farbcode: PS52), die viel besser auf dem Material haftet als andere Farben, die nicht für Lexan vorgesehen sind. Normale Kunststofffarben sind zu spröde und platzen schließlich ab, weil sie die Verwindungen der Karosserie nicht mitmachen können. Die Lackierung entsprach sowohl farblich als auch qualitativ genau meinen Vorstellungen.
Nachdem die goldene Karosserie getrocknet war, bohrte ich Löcher zur Befestigung am Chassis und konstruierte spezielle Halterungen, die zum umgebauten Chassis passten. Nachdem die Nissan Leopard F31 Karosserie auf ihrem Chassis befestigt war, druckte und montierte ich 3D-gedruckte Spurplatten (Wheelspacer), um sicherzustellen, dass die Räder im perfekten Abstand unter dem Radlauf sitzen. Danach zog ich die Schutzfolie von der Karosserie ab, brachte alle Aufkleber an und schnitt die Lichteinsätze aus. In diese Einsätze baute ich LEDs ein, lötete Schutzwiderstände an, befestigte die Kabel mit passenden Steckern für die Steuerung und klebte schließlich die Lichteinsätze hinter die Scheinwerferausschnitte auf die Innenseite der Karosserie. Abschließend stellte ich die Fahrhöhe und andere Parameter wie die Neigungsfreudigkeit an der Steuereinheit ein, um ein möglichst realistisches Erscheinungsbild zu erzielen.